The length of the links ![]() and
and ![]() is given by
is given by ![]() meters. We will restrict the first joint position of our arm model to be in the range of
meters. We will restrict the first joint position of our arm model to be in the range of
![]() and the second to be in the range of
and the second to be in the range of
![]() .
.
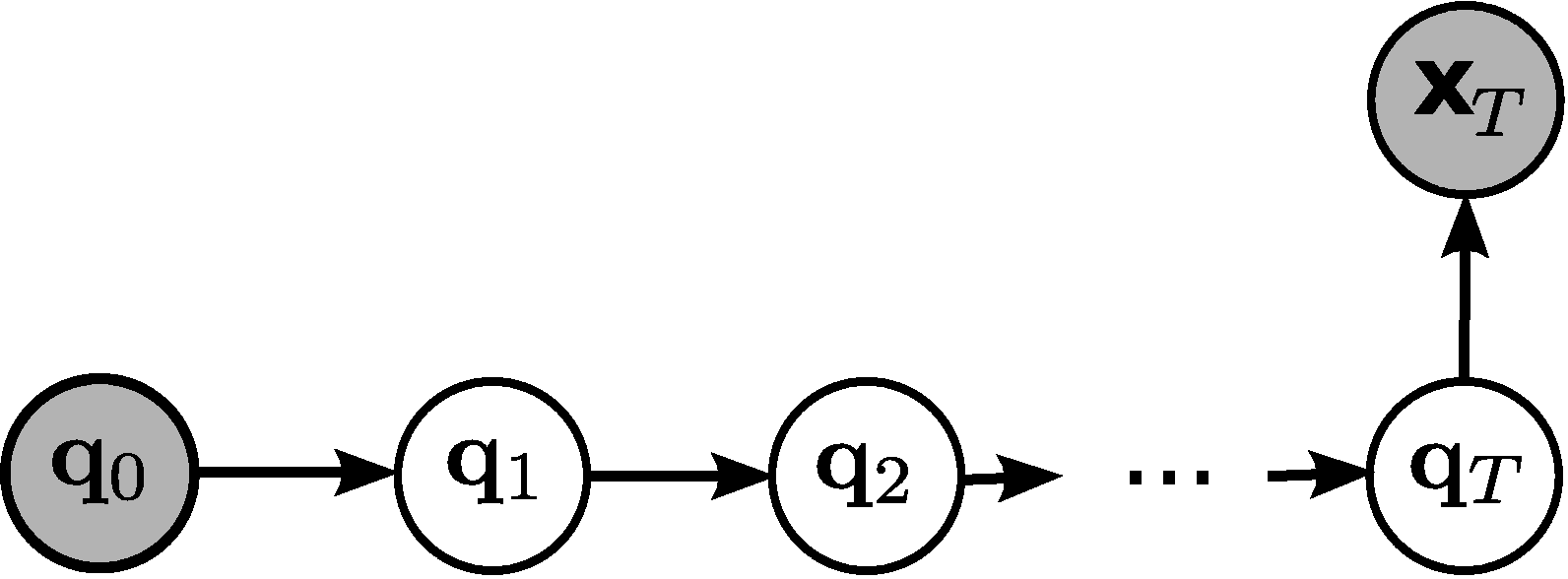
We will first discuss how to construct a Bayesian Network where we can sample from. We want to reach our target within ![]() time steps, i.e. we get a dynamic Bayesian Network with one node per time step (11 nodes), see Figure 10.
time steps, i.e. we get a dynamic Bayesian Network with one node per time step (11 nodes), see Figure 10.
|
Each node ![]() represents the joint positions
represents the joint positions
![]() at time
at time ![]() . For simplicity, we will use a discrete representation of the joint positions. Therefore we use a uniform
. For simplicity, we will use a discrete representation of the joint positions. Therefore we use a uniform
![]() grid to discretize the joint space. We will use a Gaussian motion prior in order to define the transition probabilities of
grid to discretize the joint space. We will use a Gaussian motion prior in order to define the transition probabilities of
![]() from the
from the ![]() th discrete joint position at time
th discrete joint position at time ![]() to the
to the ![]() th joint position at time
th joint position at time ![]() . Let
. Let
![]() be the
be the ![]() joint position vector (in radians), then
joint position vector (in radians), then
![]() , where
, where ![]() equals
equals
![]() . The motion prior encodes our laziness, meaning that, if not necessary, we do not want to move away from
. The motion prior encodes our laziness, meaning that, if not necessary, we do not want to move away from
![]() .
.
In order to plan a trajectory to a certain end-effector position we still need to define our kinematic task space mapping. We will also use a discrete representation for task space (Cartesian coordinates of the hand). Here, we use again a
![]() uniform grid over the range
uniform grid over the range ![]() for
for ![]() and
and ![]() . The probability of reaching the
. The probability of reaching the ![]() th discrete task space position when being in the
th discrete task space position when being in the ![]() th discrete joint space position is given by
th discrete joint space position is given by
![]() , where
, where ![]() is the non-linear mapping from the joint positions to the endeffector coordinates. The covariance matrix
is the non-linear mapping from the joint positions to the endeffector coordinates. The covariance matrix
![]() is set to
is set to
![]() .
.