Next: Pseudo-Dynamic Planning with Obstacle
Up: Planning with Approximate Inference
Previous: Task Space Planning
Now we want to add an obstacle to our environment. The obstacle is located at
![$ [0.5, 0.5]$](img177.png) in Cartesian space. For simplicity, we assume that only the end-effector can collide with the obstacle. The collision probability
in Cartesian space. For simplicity, we assume that only the end-effector can collide with the obstacle. The collision probability
 for joint position
for joint position
 is given by
is given by
![$ \exp(-1/2 \vert\vert\Phi(\mathbf{q}^{(j)}) - [0.5, 0.5]^T\vert\vert^2 / 0.15^2)$](img180.png) . We want our robot to avoid the obstacle for the whole trajectory, therefore we add the observation of not colliding with the obstacle
. We want our robot to avoid the obstacle for the whole trajectory, therefore we add the observation of not colliding with the obstacle
 for each time step
for each time step  to our Bayesian network (see Figure 11,
to our Bayesian network (see Figure 11,  notes).
notes).
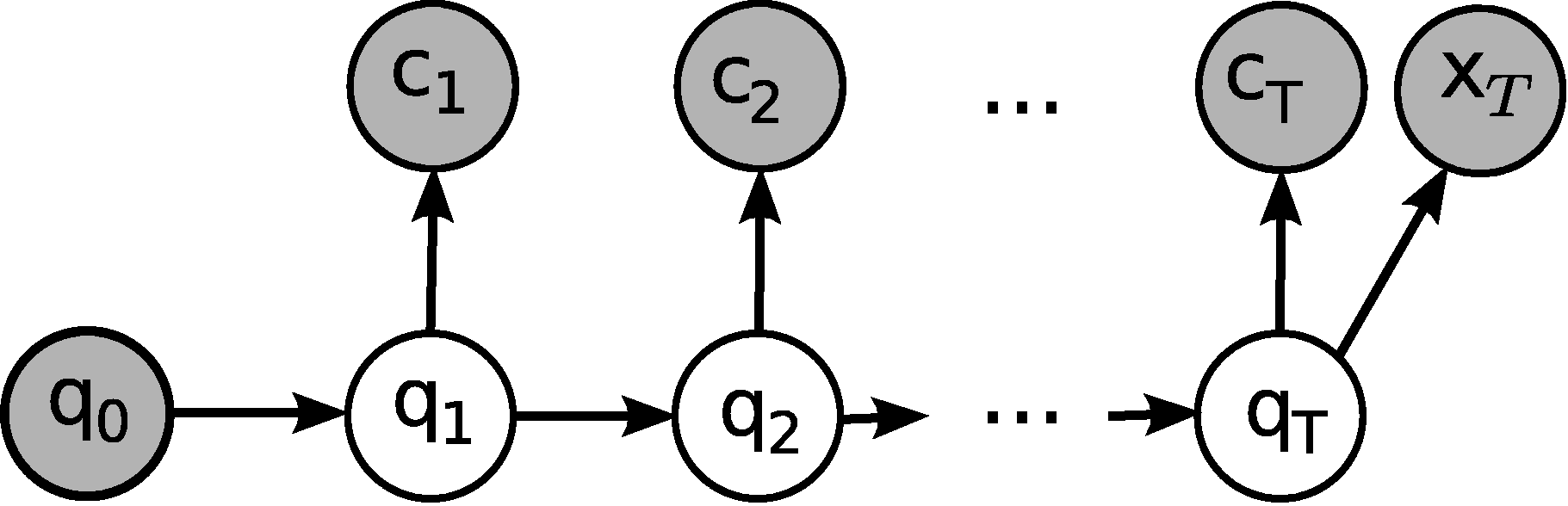
Figure 11:
Dynamic Bayesian Network for planning with obstacles.
|
|
- Generate the collision probability

- Use Gibbs sampling the same ways as before, visualize the marginals
 . How has the estimated solution changed?
. How has the estimated solution changed?
Haeusler Stefan
2011-01-25